在机器人视觉和可穿戴设备中,柔性光电传感器具有巨大潜力。适应复杂不可展曲面的高密度可拉伸像素化电子器件,已经成为下一代机器人视觉系统、皮肤贴附传感器及可穿戴电子设备的关键使能技术。现有的可拉伸像素化器件阵列策略:例如屈曲力学、弹出式结构、蛇形互连及剪纸设计,已提供部分解决方案。然而,同时实现高器件性能、拉伸性、填充因子及集成密度的策略,至今仍未出现。
近日,韩国基础科学研究院Mincheol Lee, Young Min Song & Dae-Hyeong Kim等在 Nature Materials上发文,提出了一种单层液态金属与单晶硅像素高密度集成的单片微加工策略,通过引入钛阻挡层,解决了液态金属的界面腐蚀问题,实现了填充率高达81%、双轴拉伸达100%的可重构成像平台。
这种单片式微纳加工策略,实现可定制、高密度且机械柔顺的像素化器件阵列。具有形状可重构的成像器件,填充因子高达81%,双轴拉伸性达到100%。
还展示了一种具有可调焦功能的仿人眼机器人视觉系统,以及一种可贴附于皮肤的无透镜成像系统。视网膜成像系统与表皮成像系统的协同工作,实现了多尺度视觉采集与深度感知。
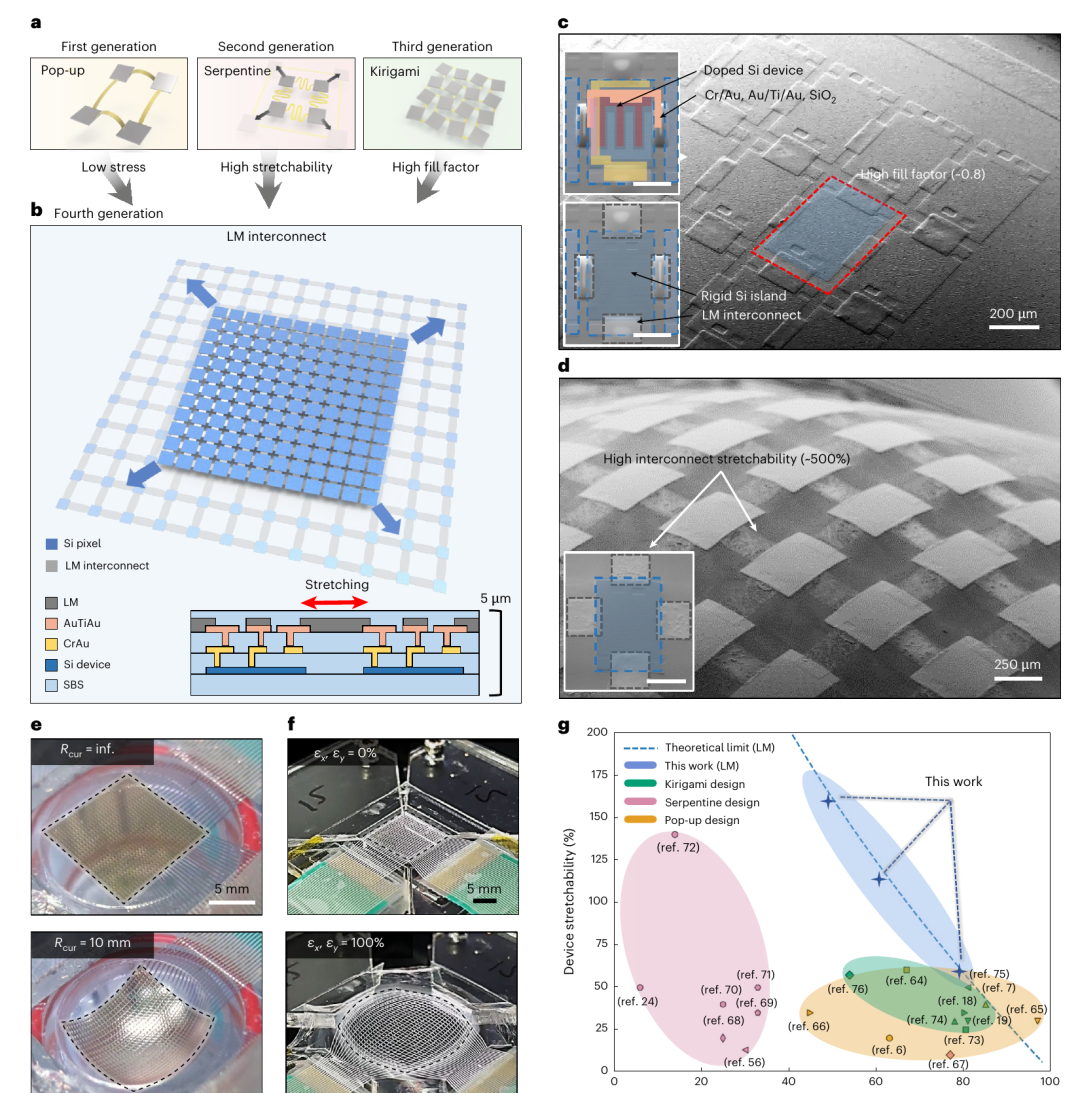
图1:硅-液态金属像素平台把传统 pop-up、蛇形和 kirigami 结构的取舍关系转向单层液态金属互连与硅像素岛协同设计。SEM 和拉伸照片显示,约 0.8 填充因子的光电二极管阵列可贴合非可展曲面,液态金属互连可承受约 500% 形变,并在填充因子-拉伸性对比图中扩展了已有结构的设计空间。
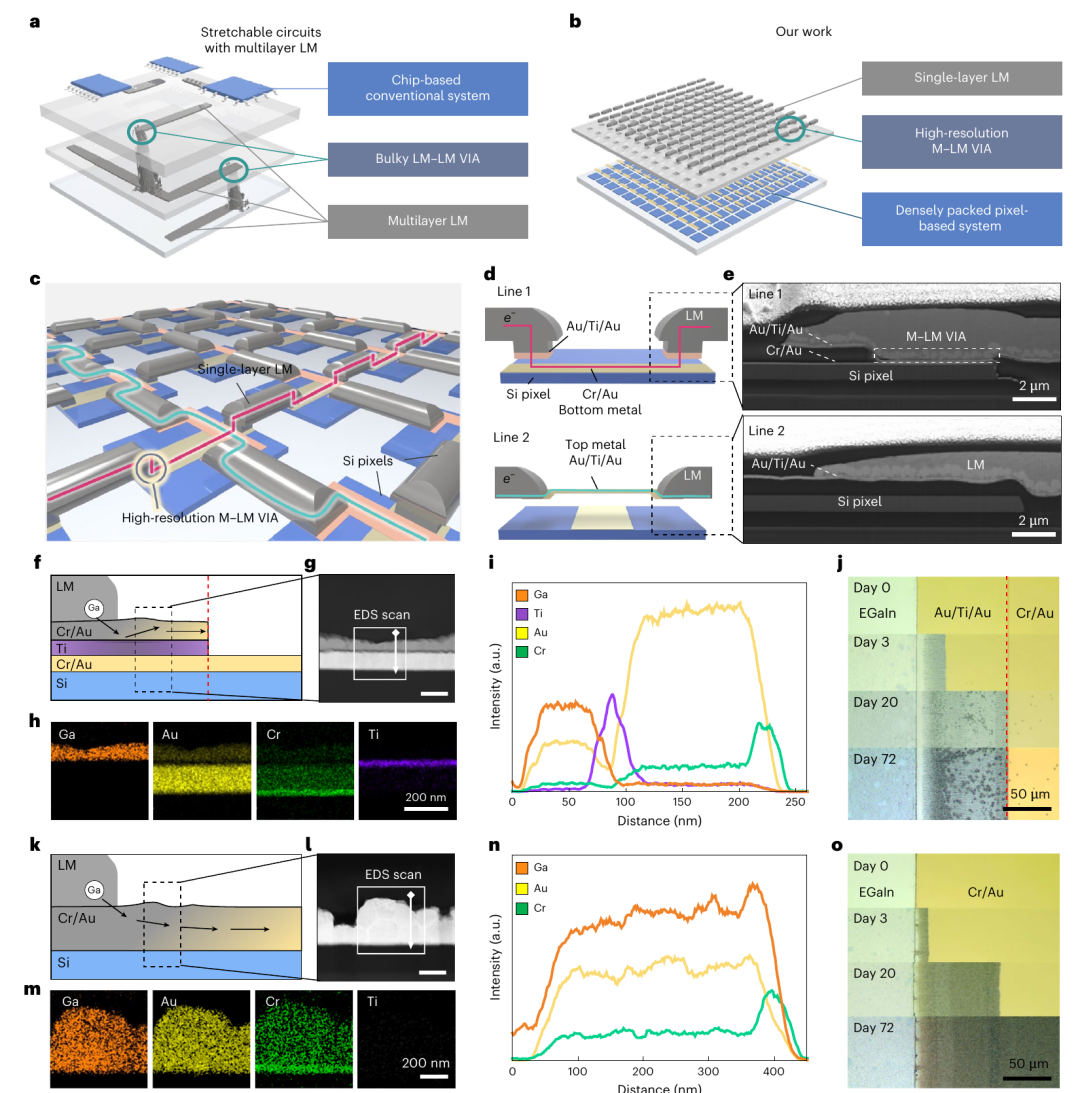
图2:单层液态金属网络通过高分辨率金属-液态金属 VIA 与硅像素上的金属布线连接,避免了传统多层液态金属互连中体积较大的 LM-LM VIA。截面 SEM、TEM 和 EDS 对照表明,Ti 中间层在 72 天后仍能把 Ga 扩散限制在上层 Au 附近;无 Ti 层时,Ga 会继续进入 Cr/Au 层并伴随形貌粗化。
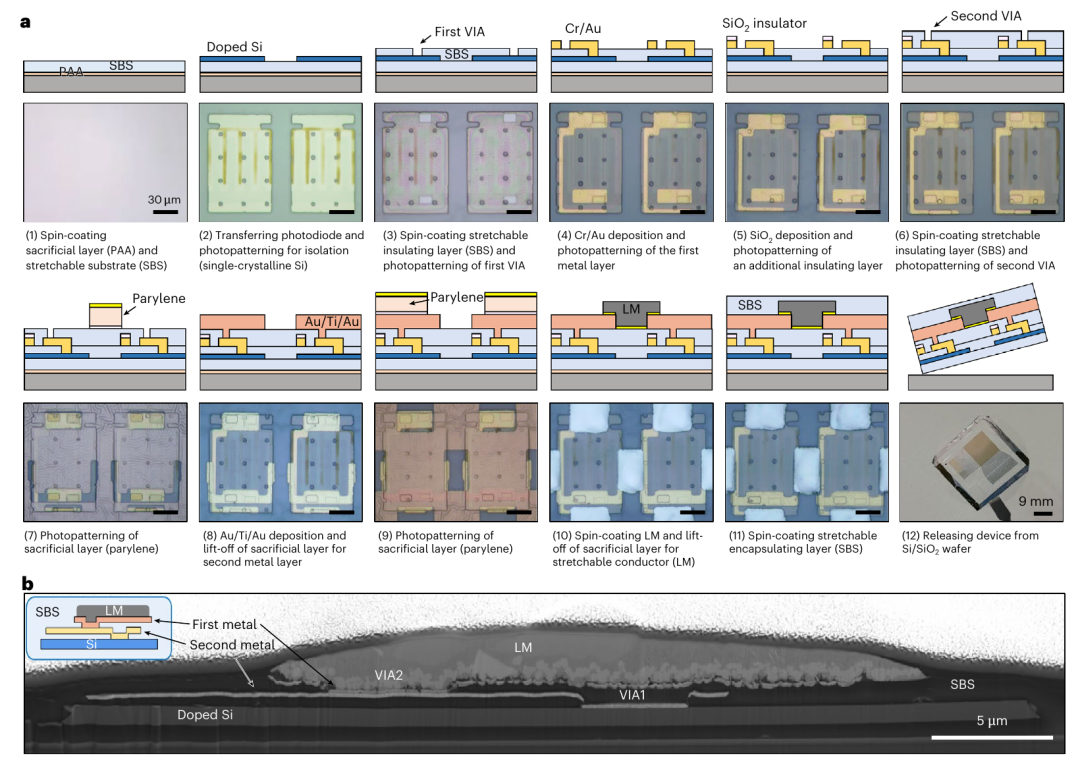
图3:单片制备流程把硅光电二极管转移、SBS 绝缘层、金属布线、Parylene 剥离掩膜、液态金属旋涂和封装整合在同一器件结构中。CryoSEM 截面确认了掺杂 Si、垂直 VIA 与 SBS 包覆液态金属互连的层级关系,整体弹性体器件厚度约为 5 μm。
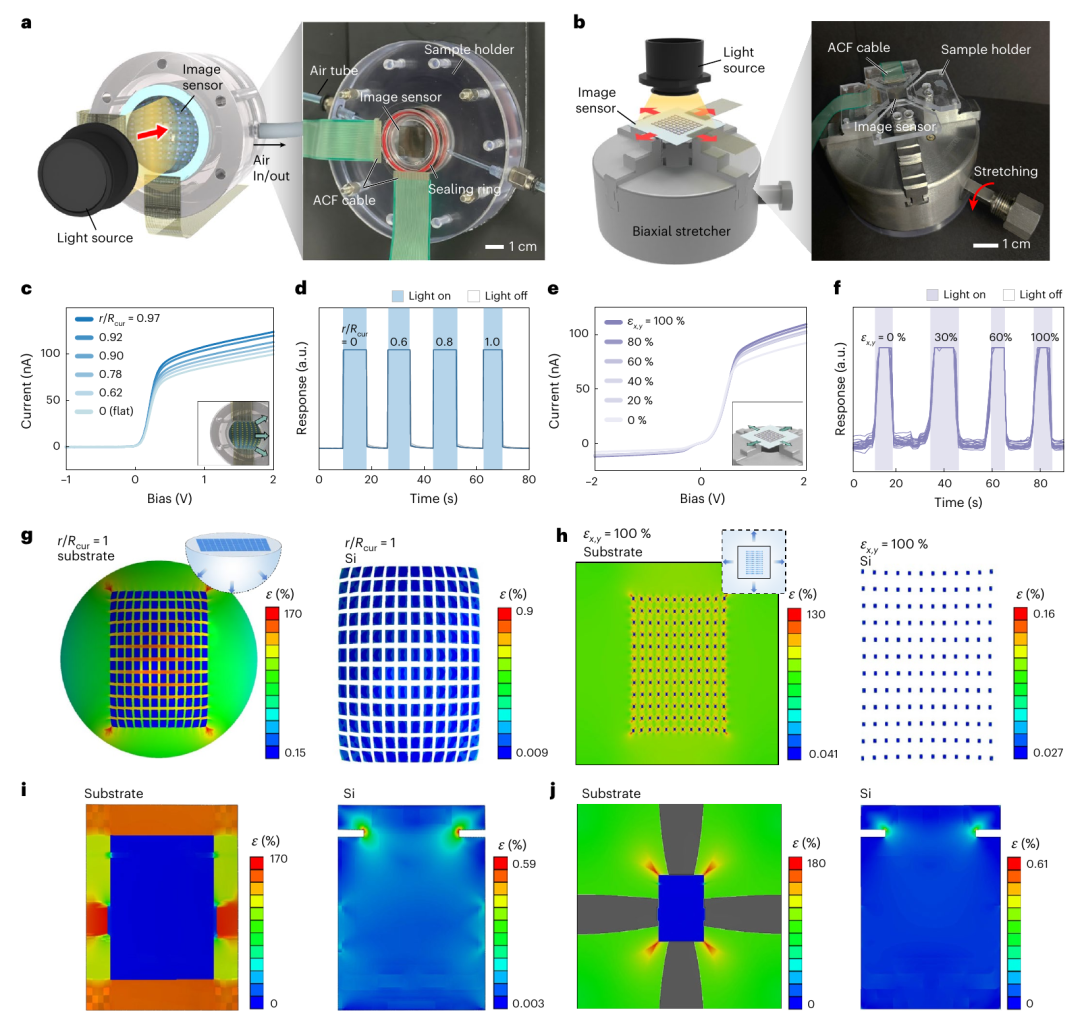
图4:半球面拉伸和双轴拉伸测试分别验证 81% 与 20% 填充因子光电二极管阵列的电学稳定性。单像素和 25 个像素阵列在不同曲率或最高 100% 双轴应变下仍保持光响应;有限元结果显示,硅像素中的最大应变在多种变形情形下保持低于 1.0%,支持硅岛的应变隔离作用。
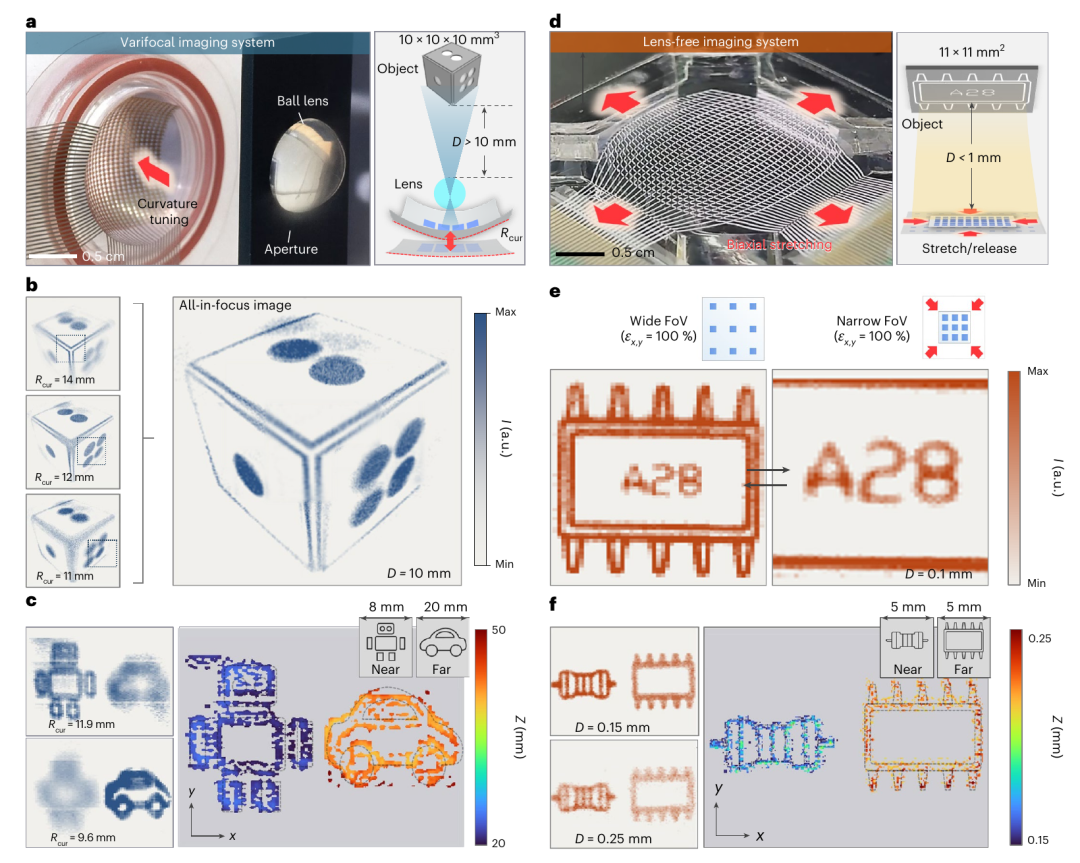
图5:基于同一可拉伸光电二极管阵列,研究人员构建了两类成像模式。半球面可拉伸阵列与球透镜和曲率调节腔结合,实现宽视场可调焦成像和 20-50 mm 的宏观深度重建;20% 填充因子阵列在无透镜近接成像中通过 0-100% 双轴拉伸调节视场,并对约 0.1 mm 间隙产生微尺度深度响应。
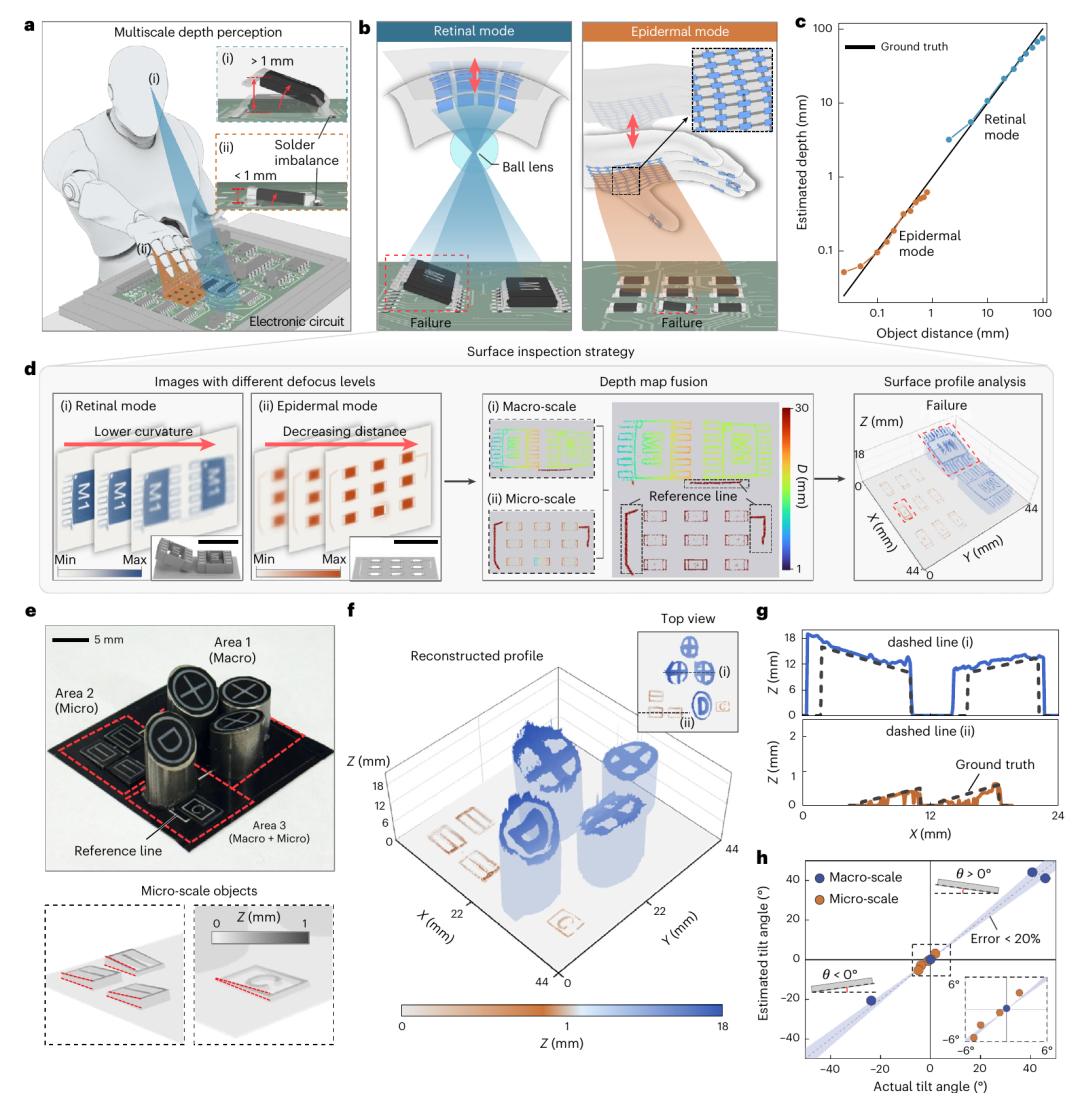
图6:多尺度深度感知系统把仿视网膜可调焦模式与贴肤式无透镜模式结合,用于电路样品的表面缺陷检测。视网膜模式覆盖 5-70 mm 宏观距离,表皮模式在 0.1-0.6 mm 范围内保持误差低于 20%;两种深度图在可靠范围内融合后,可重建跨微米到毫米尺度的高度轮廓和倾角信息。
